
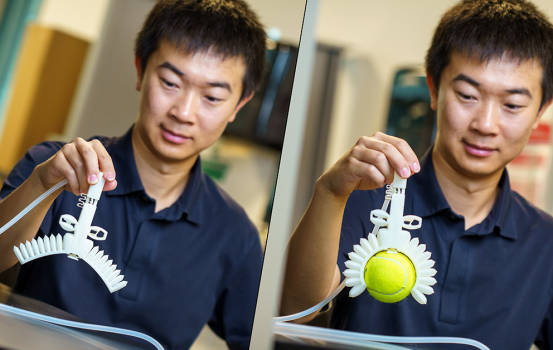
Instead, it gets power from air pressure, is triggered when it is pushed against the object to be caught, and then releases when the gripper it turned sideways.
A pressure pad at the centre of the claw detects contact and, once the claw closes, the sensor remains pressed to latch the grip. A deflection sensor in the wrist undoes the gripper, so the initial catch has to be done with the gripper above the object moving downwards (see photo).
The whole thing is an example of ‘soft robotics’, being made from a gel.
How the mechanical or pneumatic logic works is described in a Science Robotics paper (Desktop fabrication of monolithic soft robotic devices with embedded fluidic control circuits) which sadly is behind a pay wall.
The team, from University of California San Diego and chemical company BASF, developed a 3d printing technique especially for the project.

Walls as thin as 0.5mm can be made without leaks, and this capacity for detail (left) apparently helped with the mystery air-based control circuits.
Something that helps avoid leaks, is that the nozzle’s path is calculated so that it traces a continuous path as it prints each layer – rather than jumping from point to point which might leave a gap.
